- Dr Ahmed - Leading Supervisor
- Dr Didier Talamona - Cage protection cage and modular terrestrial drive Supervisor
- Dr Eugene Wong - Structure Design Supervisor
- Dr Michael Lau - Control System Design Supervisor
- Angus Tang - System Level Design (SysLeD)
- J.D. Chua - Control System Design (ConSyD)
- Edwin Goh - Robust Quadrotor Structure Design (RoQStr)
- Jeremy Yeo - Modular Payload and Battery Loader (MoPBal)
- Wong B.Z. - Robust Crash Protection Cage (RoCProC)
- Leonard Lim - Motor Terrestrial drive (MoTerD)
So our journey being with our ConSyD, J.D. Chua consultation with Dr Micheal Lau and local shop staff at Fook Hua building. We were really new at building a flying machine therefore the motor in Figure 1 and ESC in Figure 2 brought were just for experimental purposes.
 |
| Figure 1 - 5v Motor |
 |
| Figure 2 - Electronic Speed Controller 20Amp |
.jpg) |
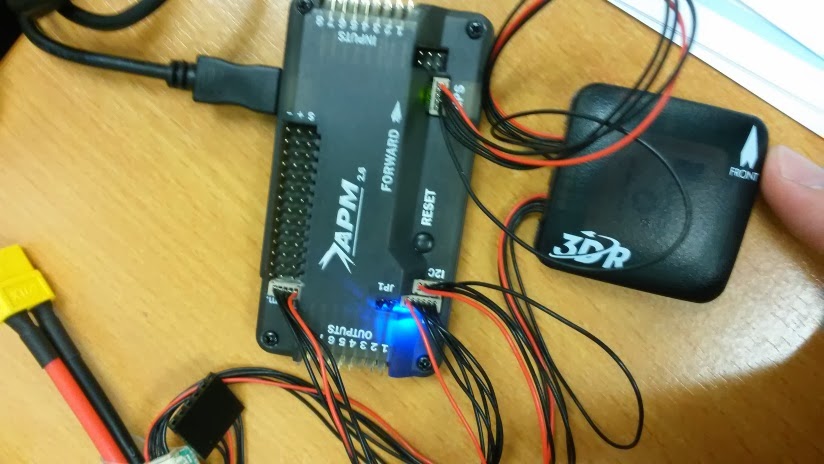
| Figure3 - The brain, ArduPilot Mega 2.6 Kit with GPS |
In order to understand more about quadcopter we were ripped the existing quadcopter apart after our first and last flight. Our first attempt to fly an existing quadcopter in Figure 4 and 5 with Dr Ahmed.
 |
| Figure 4 - First flight with Dr Ahmed with Existing quadcopter |
 |
Figure 5 - First flight with Dr Ahmed with Existing quadcopter
After 2 weeks of meddling with software and hardware our ConSyD, J.D. Chua managed to communicate to the 5v motor, he was overjoyed.
Please enjoy the video and stay tuned, cheers!!!
Video 1 - The motor is alive!
|
No comments:
Post a Comment